

About
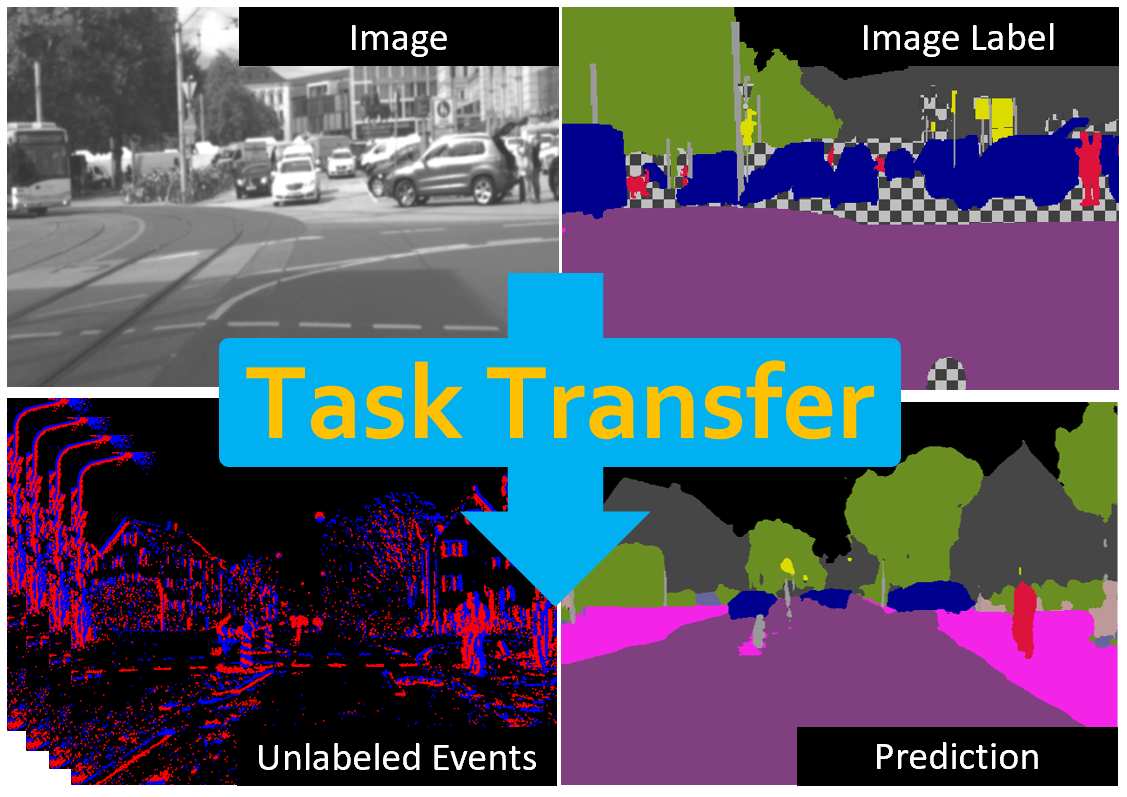
DSEC-Semantic includes semantic labels for eleven sequences (10891 frames) from the DSEC dataset. The semantic labels are generated by first warping the images from the left frame-based camera to the view of the left event camera. In a second step, a state-of-the-art semantic segmentation method is applied to the warped images to generate the final labels.
We provide two types of semantic labels with a different number of classes. The 11 class labels are consistent with the paper ESS: Learning Event-based Semantic Segmentation from Still Images [PDF]. Whereas the 19 class labels are consistent with the Cityscapes labels for evaluation. The two sets of classes are as follows:
11 class: background, building, fence, person, pole, road, sidewalk, vegetation, car, wall, and traffic sign.
19 class: road, sidewalk, building, wall, fence, pole, traffic light, traffic sign, vegetation, terrain, sky, person, rider, car, truck, bus, train, motorcycle, bicycle.
Please check out the data format page for more information.
Publications
When using this work in an academic context, please cite the following publications:
ESS: Learning Event-based Semantic Segmentation from Still Images
European Conference on Computer Vision. (ECCV), 2022.
@Article{Sun22eccv,
author = {Zhaoning Sun* and Nico Messikommer* and Daniel Gehrig and Davide Scaramuzza},
title = {ESS: Learning Event-based Semantic Segmentation from Still Images},
journal = {European Conference on Computer Vision. (ECCV)},
year = {2022},
}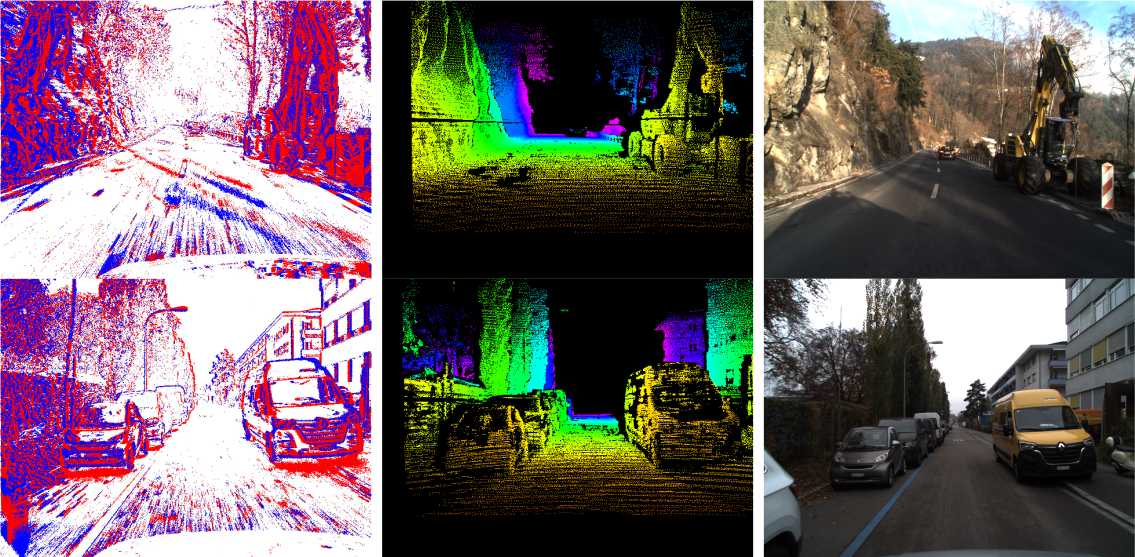
DSEC: A Stereo Event Camera Dataset for Driving Scenarios
IEEE Robotics and Automation Letters (RA-L), 2021.
@Article{Gehrig21ral,
author = {Mathias Gehrig and Willem Aarents and Daniel Gehrig and Davide Scaramuzza},
title = {DSEC: A Stereo Event Camera Dataset for Driving Scenarios},
journal = {IEEE Robotics and Automation Letters},
year = {2021},
doi = {10.1109/LRA.2021.3068942}
}