About
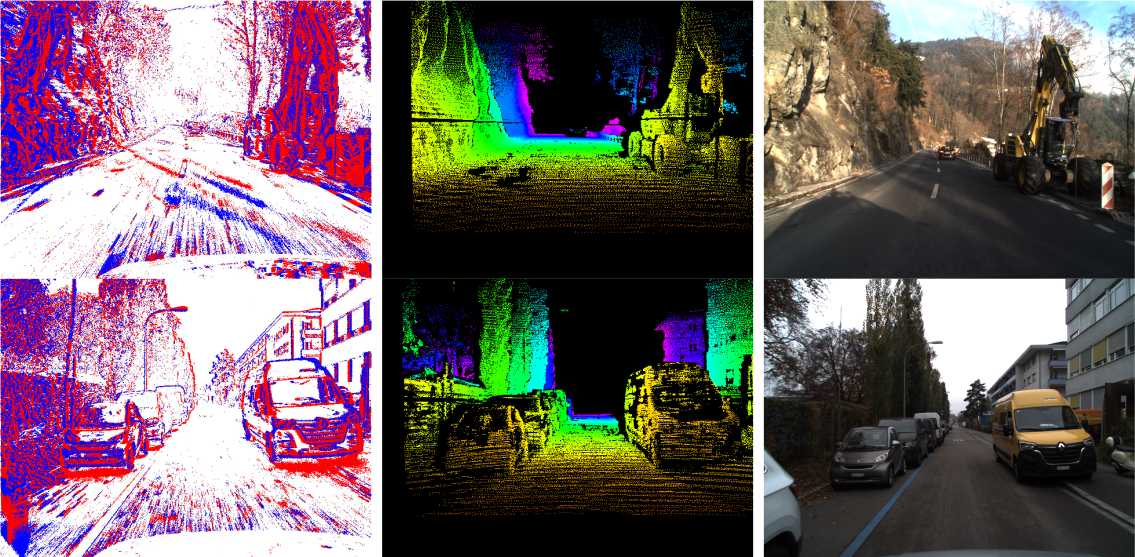
DSEC-Detection includes detection labels for 60 sequences (70379 frames, 390118 bounding boxes) including the original DSEC dataset and additional sequences with challenging scenarios. The labels are generated by running a state-of-the-art object tracking algorithm on the rectified image frames, and then warping them into the event camera frame. The detections were then manually corrected, removing false tracks. The labels include bounding box and class information and also track identities, for object-tracking applications. The detected classes include: pedestrian, rider, car, bus, truck, bicycle, motorcycle, train

These bounding box labels were used in the following publication: Daniel Gehrig and Davide Scaramuzza, “Low Latency Automotive Vision with Event Cameras”, Nature, 2024 [PDF Open Access]. When using this work in an academic context, please cite the following publications:

@Article{Gehrig24nature,
author = {Gehrig, Daniel and Scaramuzza, Davide},
title = {Low Latency Automotive Vision with Event Cameras},
booktitle = {Nature},
year = {2024}
}
DSEC: A Stereo Event Camera Dataset for Driving Scenarios
IEEE Robotics and Automation Letters (RA-L), 2021.
@Article{Gehrig21ral,
author = {Mathias Gehrig and Willem Aarents and Daniel Gehrig and Davide Scaramuzza},
title = {DSEC: A Stereo Event Camera Dataset for Driving Scenarios},
journal = {IEEE Robotics and Automation Letters},
year = {2021},
doi = {10.1109/LRA.2021.3068942}
}Download
To download, visualize and play around with the dataset follow the instructions in the README of our utility tool dsec-det. Or find the zipped data for download below. The data contains (1) raw images, events, and calibration files for new sequences in the train and test set, (2) object detection labels and track ids for all sequences (including the original and new ones), and (3) the remapped images in the event view for all sequences.
Check out this link for more details on the exact data format.
Note: This data contains new sequences which need to be merged with the original
DSEC dataset. Follow instructions here to do so.
For questions, please leave an issue on our project page on GitHub