A Stereo Event Camera Dataset for Driving Scenarios
News
- June 13, 2023: Release of object detection labels on the project page!
- November 26, 2022: Release of Lidar and IMU data on the download page!
- July 14, 2022: Release of DSEC-Semantic. Check out the ECCV22 Paper!
- October 19, 2021: Release of the optical flow benchmark. Check out the Video!
- July 7, 2021: Release of the disparity benchmark.
- July 6, 2021: Youtube video summary of the CVPR 2021 competition is available.
- June 16, 2021: The CVPR 2021 competition finished: leaderboard
- June 5, 2021: Exposure timestamps of the global shutter cameras are available.
- June 2, 2021: The CVPR 2021 submission page and leaderboard are now up!
- May 28, 2021: The submission format and technical report specifications for the CVPRW21 competition are finalized.
About
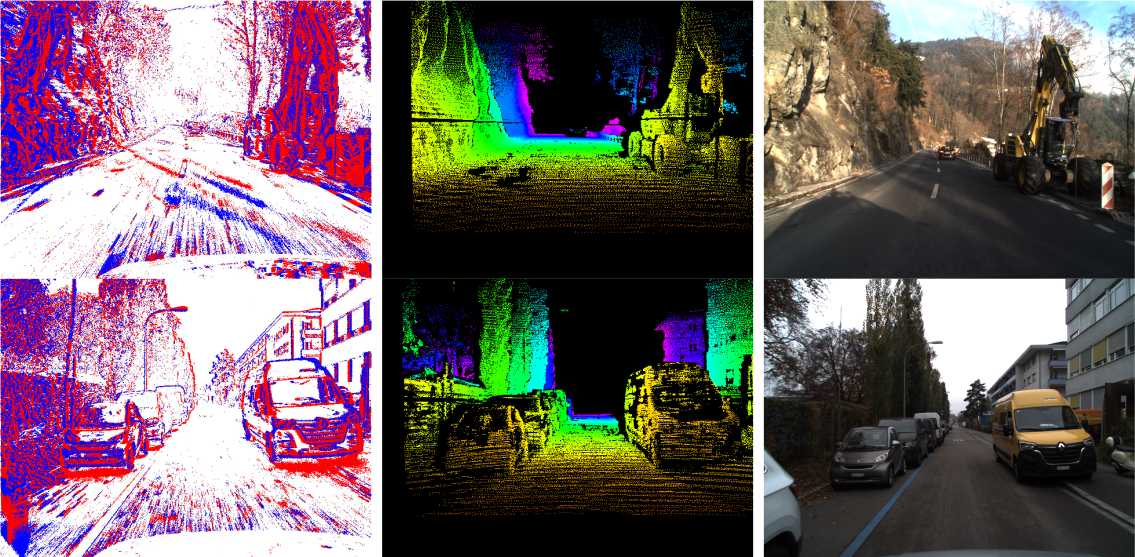
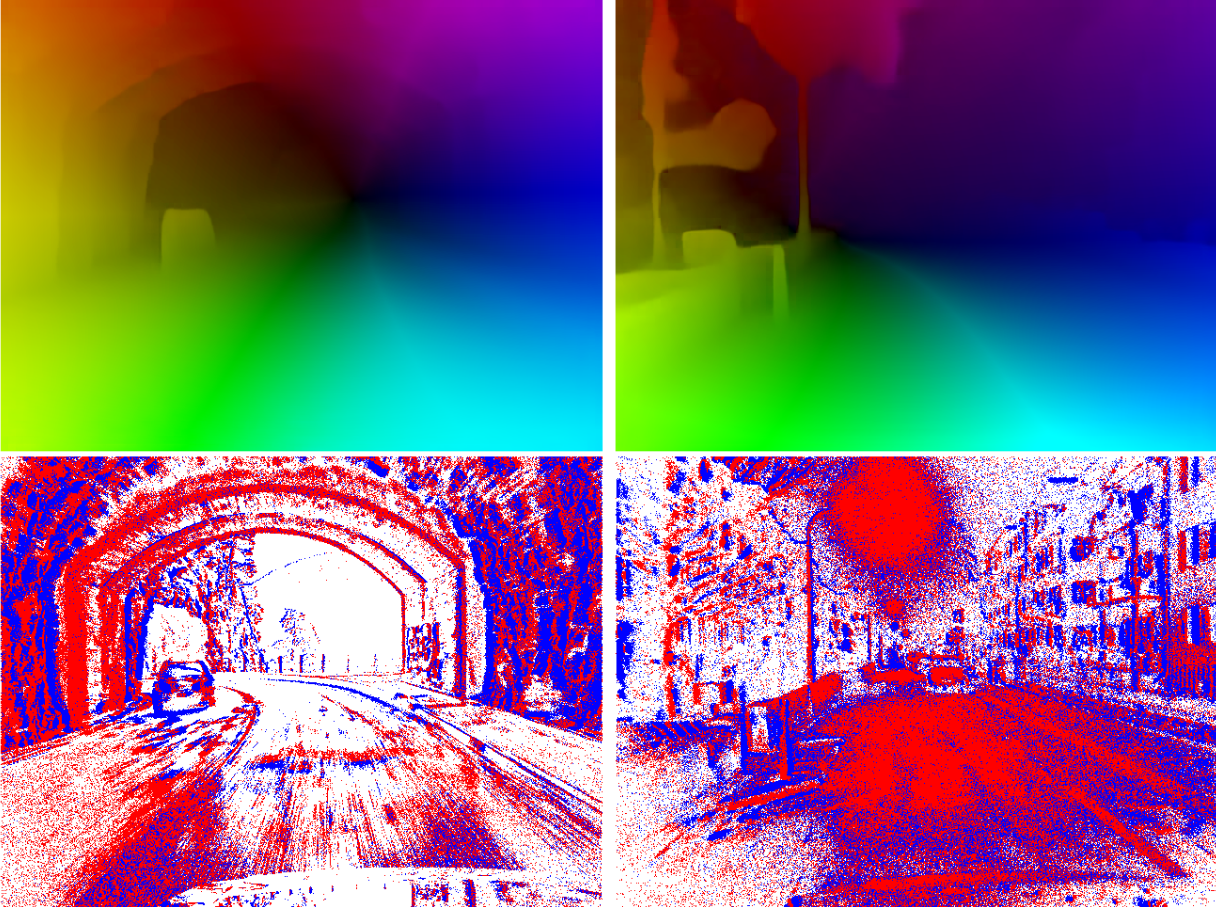
DSEC is a stereo camera dataset in driving scenarios that contains data from two monochrome event cameras and two global shutter color cameras in favorable and challenging illumination conditions. In addition, we collect Lidar data and RTK GPS measurements, both hardware synchronized with all camera data. One of the distinctive features of this dataset is the inclusion of VGA-resolution event cameras. Event cameras have received increasing attention for their high temporal resolution and high dynamic range performance. However, due to their novelty, event camera datasets in driving scenarios are rare. This work presents the first high-resolution, large-scale stereo dataset with event cameras. The dataset contains 53 sequences collected by driving in a variety of illumination conditions and provides ground truth disparity for the development and evaluation of event-based stereo algorithms.
Publications
When using this work in an academic context, please cite the following publications:
DSEC: A Stereo Event Camera Dataset for Driving Scenarios
IEEE Robotics and Automation Letters (RA-L), 2021.
@Article{Gehrig21ral,
author = {Mathias Gehrig and Willem Aarents and Daniel Gehrig and Davide Scaramuzza},
title = {DSEC: A Stereo Event Camera Dataset for Driving Scenarios},
journal = {IEEE Robotics and Automation Letters},
year = {2021},
doi = {10.1109/LRA.2021.3068942}
}
E-RAFT: Dense Optical Flow from Event Cameras
International Conference on 3D Vision (3DV), 2021
@InProceedings{Gehrig3dv2021,
author = {Mathias Gehrig and Mario Millh\"ausler and Daniel Gehrig and Davide Scaramuzza},
title = {E-RAFT: Dense Optical Flow from Event Cameras},
booktitle = {International Conference on 3D Vision (3DV)},
year = {2021}
}
License
This dataset is provided to you under the Creative Commons Attribution-ShareAlike 4.0 International public license (CC BY-SA 4.0). This means that you must attribute the work in the manner specified by the authors and must distribute your contributions under the same license. Using the material for commercial purposes is allowed.